
Incremental 3D Open-set Instance-Semantic Map Reconstruction
This is my Master’s thesis conducted within Computer Vision and Geometry group at ETH Zurich. Descriptions: Implemented an incremental pipeline for 3D high-quality instance map reconstruction and instance-level open-set semantic feature aggregation from RGB-D images.
Aug 1, 2025
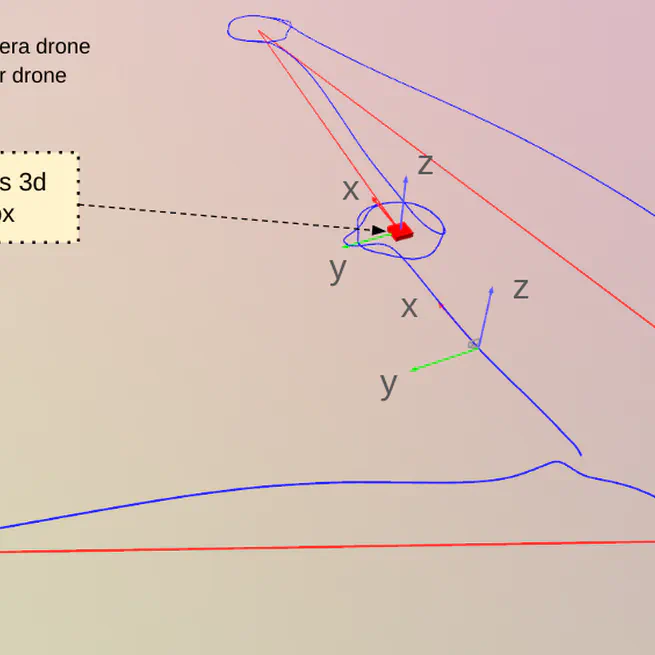
Vision-based Drone Flight via Reinforcement Learning
This project was conducted within Robotics and Perception Group at Universitat Zurich. Descriptions: Based on the observation of 2D bounding boxes from the YOLO detector and the drone dynamics from MoCap System, an RL-based drone controller was trained to achieve a stable and smooth following of the target drone. Designed a set of reward functions to achieve smoothness and robustness of the vision-based following. A PPO model was trained with a drone dynamic model, and experiments were conducted in both drone simulator and real world.
Sep 1, 2024
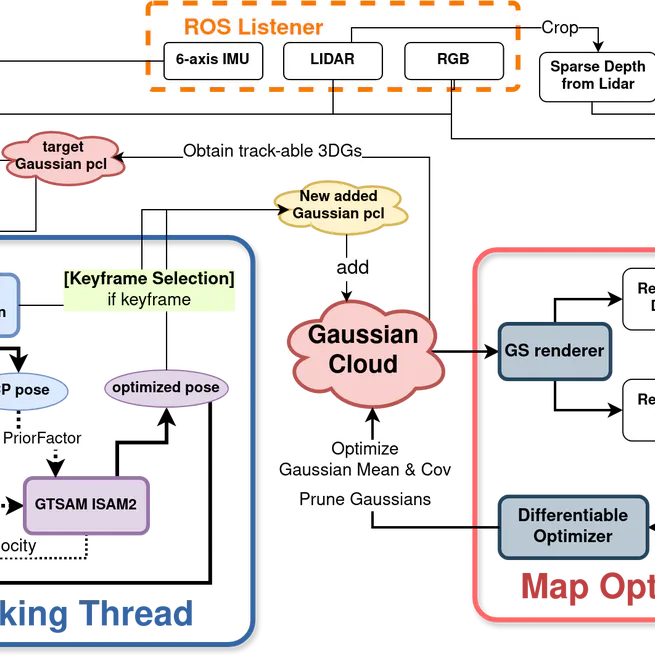
Lidar-Visual-Inertial Odometry with Gaussian Splatting
This project was conducted within Robotics System Lab at ETH Zurich. Descriptions: Incorporated LiDAR’s depth instead of stereo-based depth to improve accuracy and consistency of GS SLAM. Implemented a loosely coupled, optimization-based LVIO system by fusing Lidar and RGB data. Outperformed other GS-SLAM methods by the time on localization accuracy and processing speed.
Jun 1, 2024
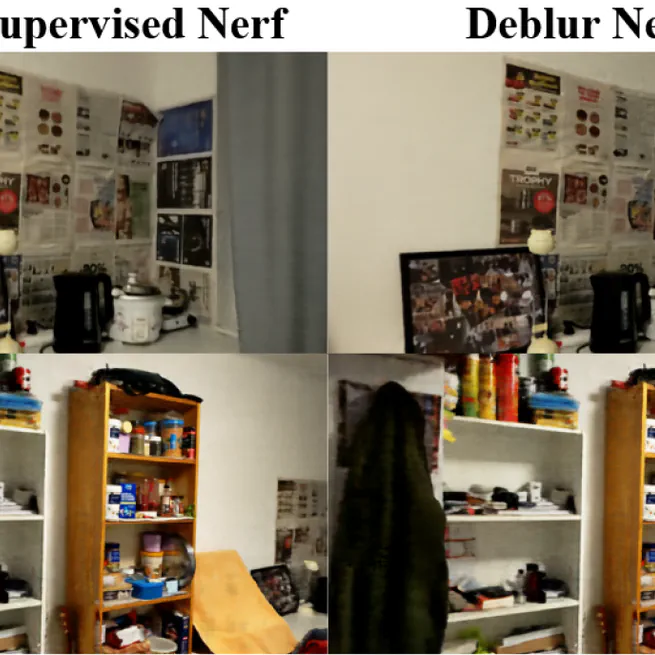
Head-Worn Camera Image Stabilization using Neural Radiance Field
This project was conducted within Computer Vision and Geometry group at ETH Zurich. Descriptions: Modified and extended the ‘Depth-Supervised NeRF’ pipeline for reconstructing indoor environments using the depth prior. Achieved good reconstruction quality in the bedroom scene given limited training frames (Sparse NeRF)
Jun 1, 2023
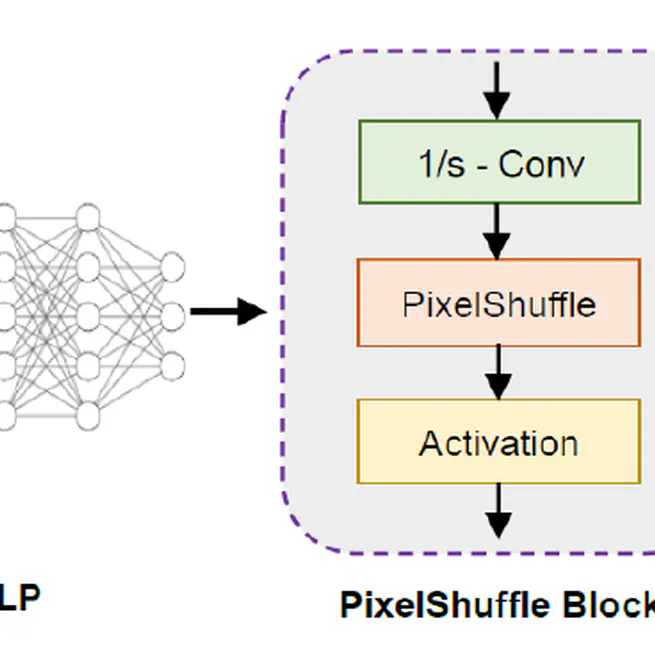
Neural Representation-based Medical Microscopic Image Compression
My bachelor’s thesis for the BEng degree in Computer Science. Descriptions: Designed an Embedding-MLP-PixelShuffle pipeline to compress single image based on neural representation. Designed a medical microscope image-based subsampling algorithm to reduce image size at the sending end and deployed a neural representation network for super-resolution of the decompressed image at the receiving end.
Jun 1, 2022
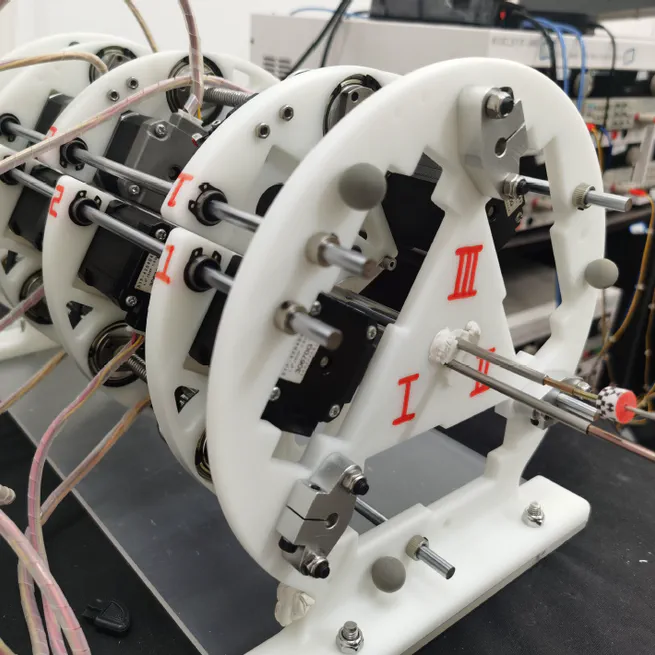
Multi-Arm Concentric Tube Robot for Minimally Invasive Surgery
My bachelor’s thesis for the BEng degree in Mechanical Engineering. Descriptions: Designed a fully functional system for clinical minimally invasive surgery. Including design of the mechanical structure, kinematic modeling, calibration on the concentric tube arm, and calibration on the Multi-Arm C.T.R. system. Designed a 6D pose detection algorithm for the end vision tag of the continuum robot (C++) Designed a calibration algorithm for C.T.R. and deployed inter-arm hand-eye calibration on the Multi-Arm CTR system Achieved inter-arm motion independence and a more concentrated distribution of surgery arms (closer to each other)
Jun 1, 2022