Multi-Arm Concentric Tube Robot for Minimally Invasive Surgery
Jun 1, 2022
·
1 min read
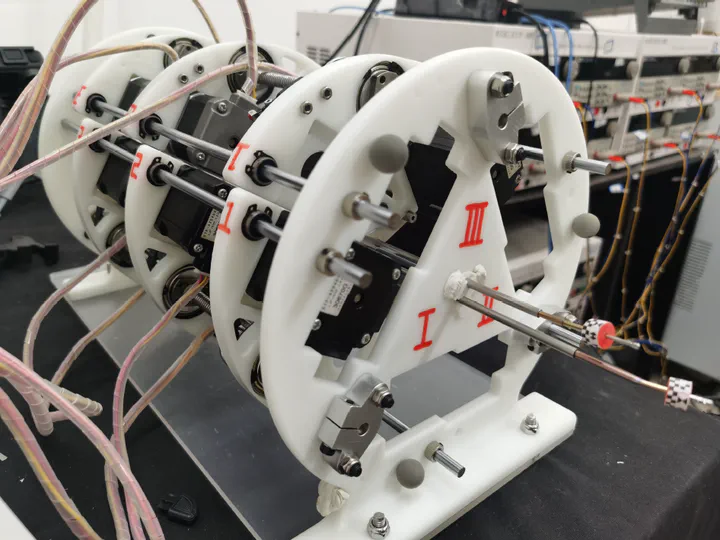
My bachelor’s thesis for the BEng degree in Mechanical Engineering.
Descriptions:
- Designed a fully functional system for clinical minimally invasive surgery. Including design of the mechanical structure, kinematic modeling, calibration on the concentric tube arm, and calibration on the Multi-Arm C.T.R. system.
- Designed a 6D pose detection algorithm for the end vision tag of the continuum robot (C++)
- Designed a calibration algorithm for C.T.R. and deployed inter-arm hand-eye calibration on the Multi-Arm CTR system
- Achieved inter-arm motion independence and a more concentrated distribution of surgery arms (closer to each other)