Lidar-Visual-Inertial Odometry with Gaussian Splatting
Jun 1, 2024
·
1 min read
This project was conducted within Robotics System Lab at ETH Zurich.
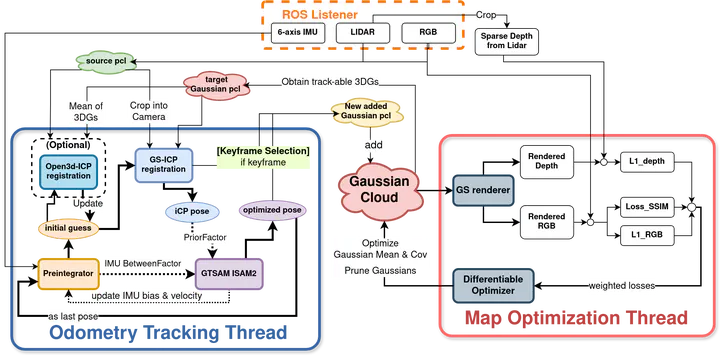
Descriptions:
- Incorporated LiDAR’s depth instead of stereo-based depth to improve accuracy and consistency of GS SLAM.
- Implemented a loosely coupled, optimization-based LVIO system by fusing Lidar and RGB data.
- Outperformed other GS-SLAM methods by the time on localization accuracy and processing speed.