Here are a selection of projects that I have worked on over the years.
This is my Master’s thesis conducted within Computer Vision and Geometry group at ETH Zurich. Descriptions: Implemented an incremental pipeline for 3D high-quality instance map reconstruction and instance-level open-set semantic feature aggregation from RGB-D images.
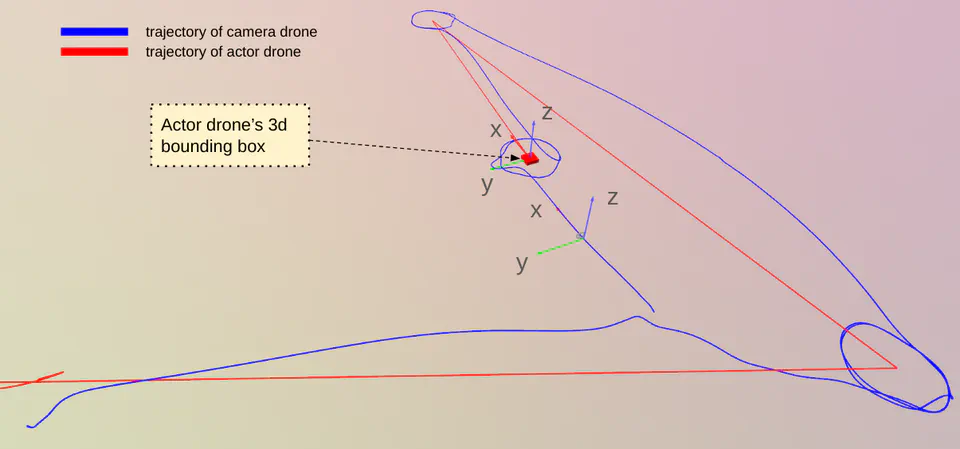
This project was conducted within Robotics and Perception Group at Universitat Zurich. Descriptions: Based on the observation of 2D bounding boxes from the YOLO detector and the drone dynamics from MoCap System, an RL-based drone controller was trained to achieve a stable and smooth following of the target drone. Designed a set of reward functions to achieve smoothness and robustness of the vision-based following. A PPO model was trained with a drone dynamic model, and experiments were conducted in both drone simulator and real world.
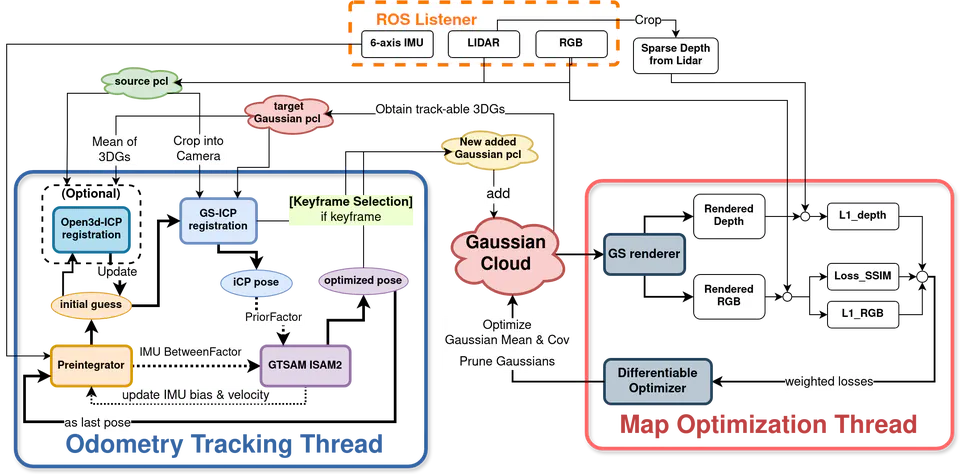
This project was conducted within Robotics System Lab at ETH Zurich. Descriptions: Incorporated LiDAR’s depth instead of stereo-based depth to improve accuracy and consistency of GS SLAM. Implemented a loosely coupled, optimization-based LVIO system by fusing Lidar and RGB data. Outperformed other GS-SLAM methods by the time on localization accuracy and processing speed.
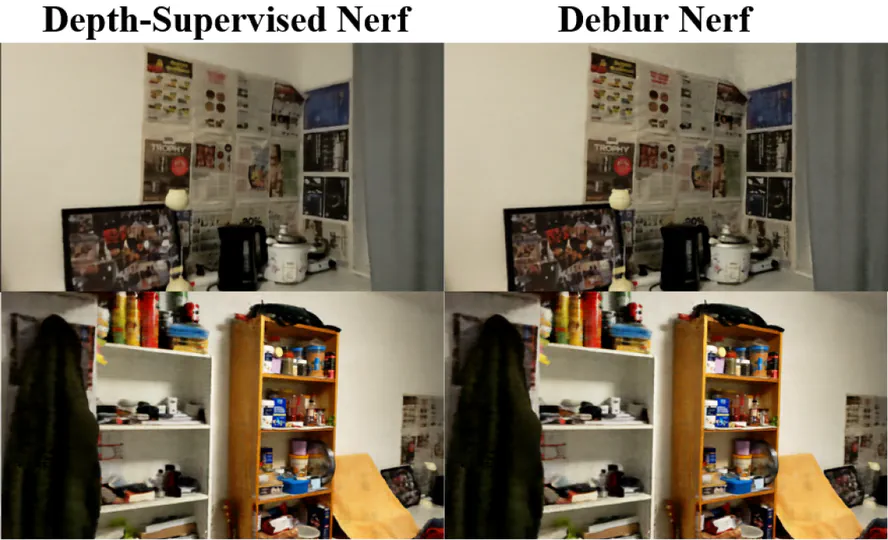
This project was conducted within Computer Vision and Geometry group at ETH Zurich. Descriptions: Modified and extended the ‘Depth-Supervised NeRF’ pipeline for reconstructing indoor environments using the depth prior. Achieved good reconstruction quality in the bedroom scene given limited training frames (Sparse NeRF)
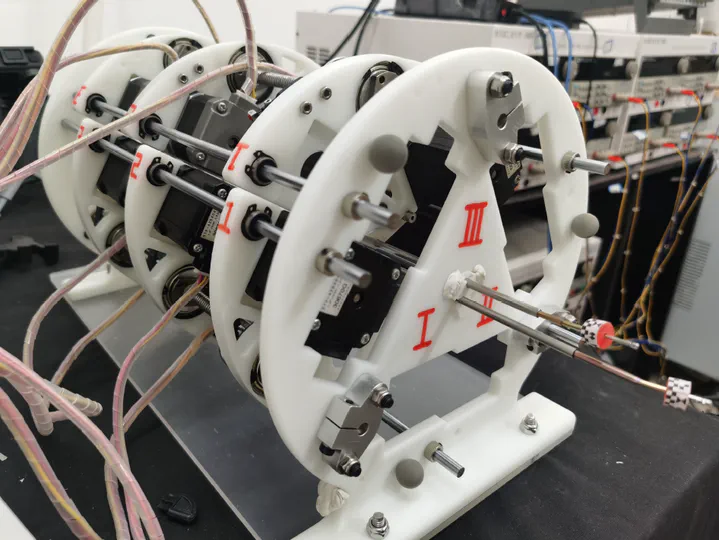
My bachelor’s thesis for the BEng degree in Mechanical Engineering. Descriptions: Designed a fully functional system for clinical minimally invasive surgery. Including design of the mechanical structure, kinematic modeling, calibration on the concentric tube arm, and calibration on the Multi-Arm C.T.R. system. Designed a 6D pose detection algorithm for the end vision tag of the continuum robot (C++) Designed a calibration algorithm for C.T.R. and deployed inter-arm hand-eye calibration on the Multi-Arm CTR system Achieved inter-arm motion independence and a more concentrated distribution of surgery arms (closer to each other)