MonoTracker: Monocular RGB-Only 6D Tracking of Unknown Object (BMVC 2025 Oral)
Jul 1, 2025· ,,,,·
0 min read
,,,,·
0 min read
Zilong Deng
Shaochang Tan
Zuria Bauer
Daniel Barath
Marc Pollefeys
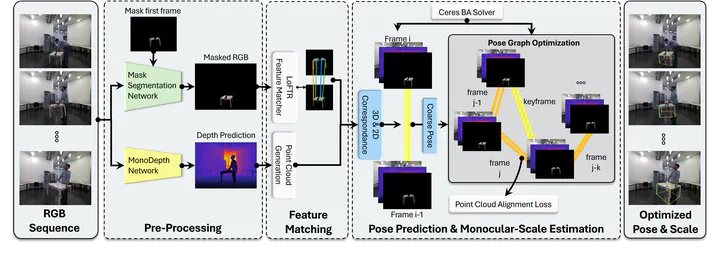 Main Pipeline
Main PipelineAbstract
Estimating the six degrees of freedom (6D) pose of unknown objects using only monocular RGB images is a challenging task, especially when dealing with textureless and small objects. In this paper, we propose a novel pipeline, MonoTracker, for 6D object pose estimation and tracking that operates without any prior depth information. MonoTracker is a model-free, RGB-only, 6D detector that works on unseen objects. It leverages state-of-the-art pre-trained deep learning models, enabling zero-shot 6D pose estimation by jointly optimizing object poses and correcting scale inconsistencies in monocular depth predictions. We validate our method on three public datasets – YCBInEOAT, HO3D, and BEHAVE – demonstrating significant improvements over the state of the art. As a downstream application, we also show that the estimated camera poses can be used as input in NeRF pipelines, facilitating novel-view synthesis. Our results highlight the potential of monocular RGB inputs for accurate 6D object tracking and reconstruction in real-world scenarios.
Type
Publication
In The Thirty Sixth British Machine Vision Conference