Vision-based Drone Flight via Reinforcement Learning
This project was conducted within Robotics and Perception Group at Universitat Zurich.
Descriptions:
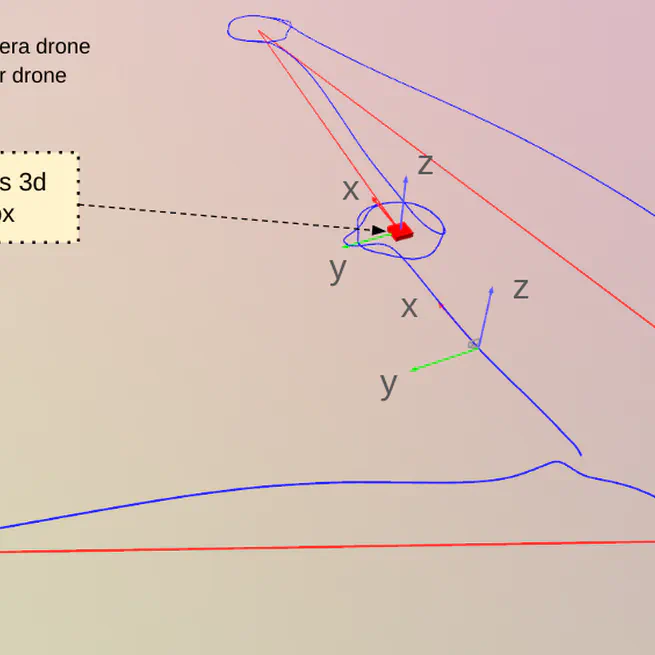
Based on the observation of 2D bounding boxes from the YOLO detector and the drone dynamics from MoCap System, an RL-based drone controller was trained to achieve a stable and smooth following of the target drone. Designed a set of reward functions to achieve smoothness and robustness of the vision-based following. A PPO model was trained with a drone dynamic model, and experiments were conducted in both drone simulator and real world.
Sep 1, 2024