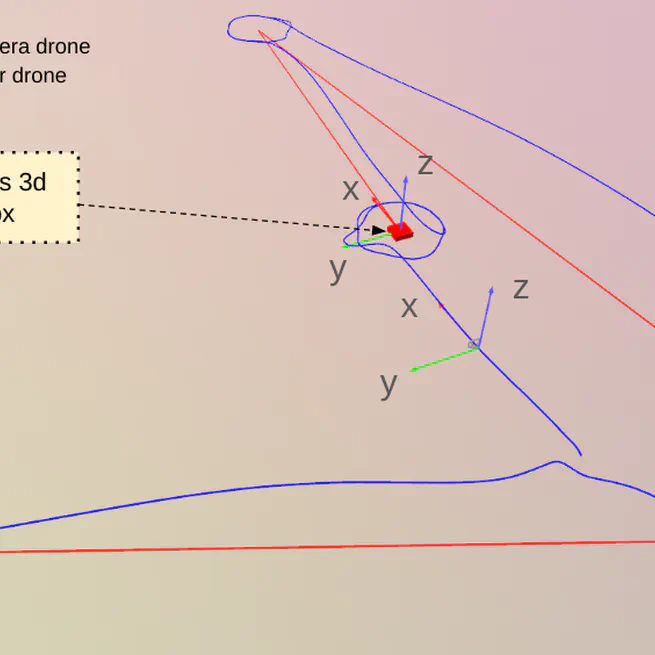
基于强化学习的无人机视觉跟随
该项目进行于苏黎世大学Robotics and Perception Group。 Descriptions: 基于yolo检测器输出的2d检测框,设计奖励函数并通过无人机仿真环境采样来训练强化学习模型,实现无人机在纯RL控制下稳定且平滑地追踪目标无人机
9月 1, 2024
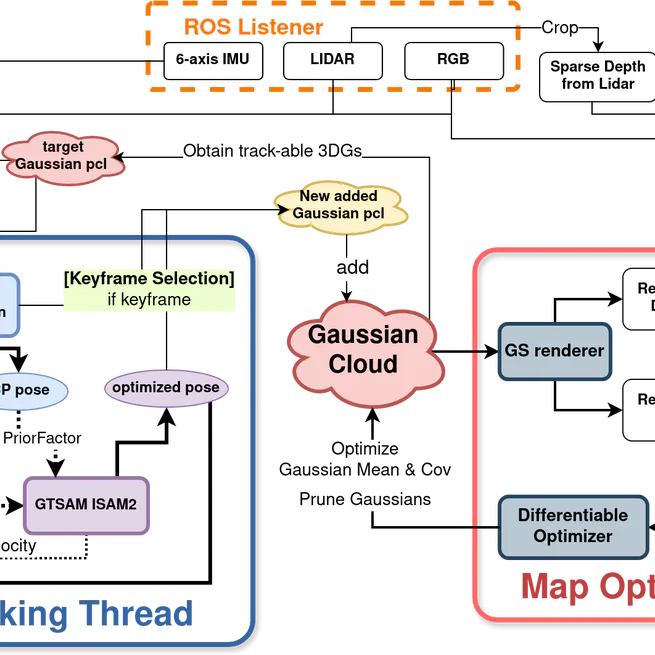
基于高斯溅射的雷达-视觉-惯性里程计(LVIO)
该项目进行于苏黎世联邦理工Robotics System Lab。 描述: 将雷达数据和RGB数据融合为统一的高斯点云,与全局高斯点云进行比较,通过最大似然估计来实现里程计 结合GTSAM优化器实现了基于数据融合的LVIO,相较其他基于深度相机的GS-SLAM方案大大提升了定位精度和重建质量
6月 1, 2024
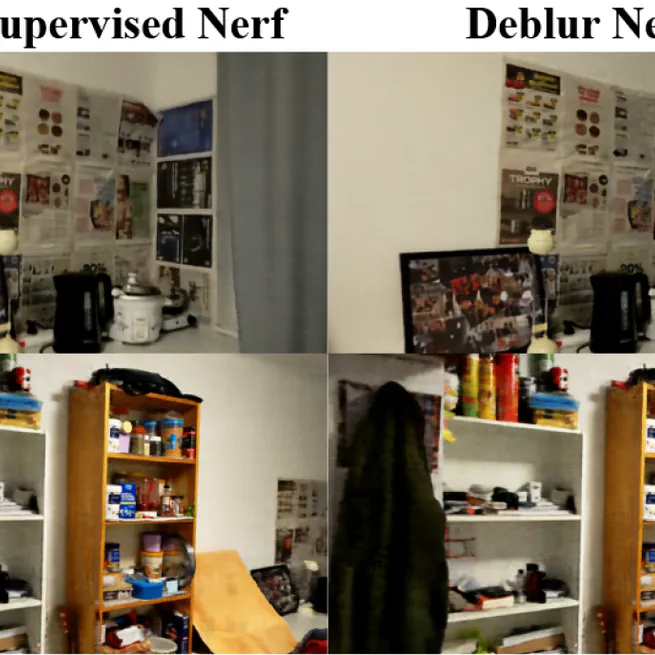
基于NeRF对VR头戴相机进行图像稳定
该项目进行于苏黎世联邦理工的Computer Vision and Geometry组。 描述: 在“Depth-Supervised NeRF”的基础上对其流程进行修改和拓展,从而使用深度先验来重建室内环境 实现“Deblur-NeRF”, 通过运动先验来对带有运动模糊的输入图像进行去噪声学习,在VR中渲染模型来实现图像稳定 在只使用有限的训练视角且输入图像有运动噪声的情况下,对卧室环境达到了相对较好的三维重建质量
6月 1, 2023
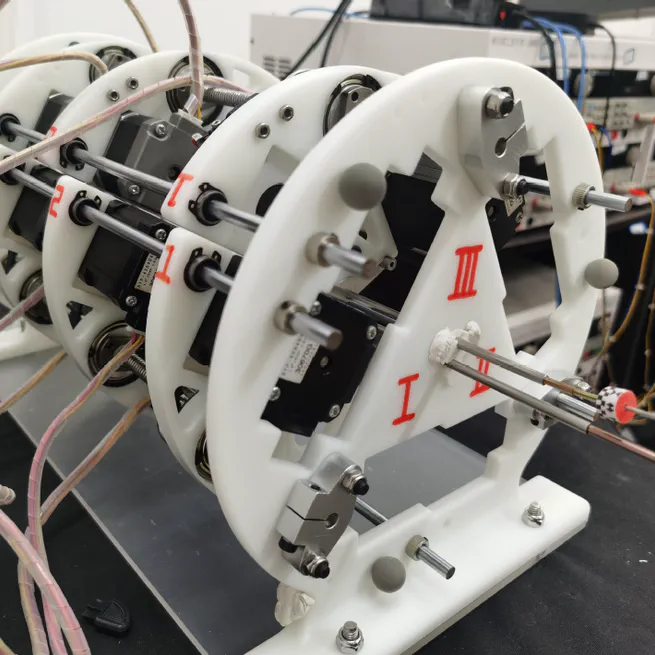
用于微创手术的多臂同心管机器人
机械工程本科毕业设计。 描述: 实现了完整功能的多臂同心管微创手术机器人。包括机械设计,动力学建模,同心管臂标定以及多臂同心管机器人系统标定 设计了同心管机械臂的标定算法与基于视觉的连续体机器人末端视觉标签的6D姿态估计算法(C++) 在实现了臂与臂之间运动独立的同时,达到了一个更靠近中心轴线的臂间根部分布(臂与臂之间的距离足够小)
6月 1, 2022
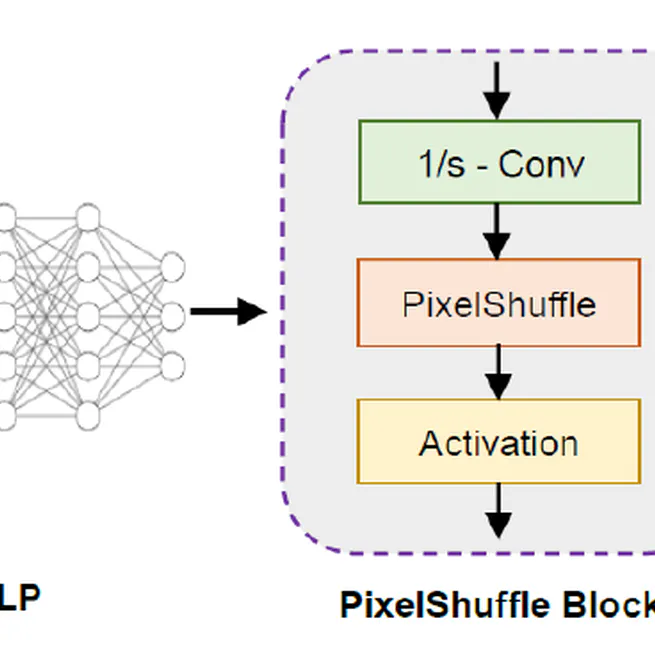
基于隐式神经表示的医疗显微图像压缩算法
计算机本科毕业设计。 描述: 设计了Embedding-MLP-PixelShuffle 架构来对高分辨率医疗显微图像进行压缩,并对神经表示进行低秩正则化 部署了一套基于隐式神经表示的超分辨率算法在接收端对解压后的图像进行还原(对应发送端的初步压缩) 在压缩率为0.2-0.7区间时,实现了接近于JPEG2000算法的 BPP-PSNR 和 BPP-MSSSIM 表现
6月 1, 2022