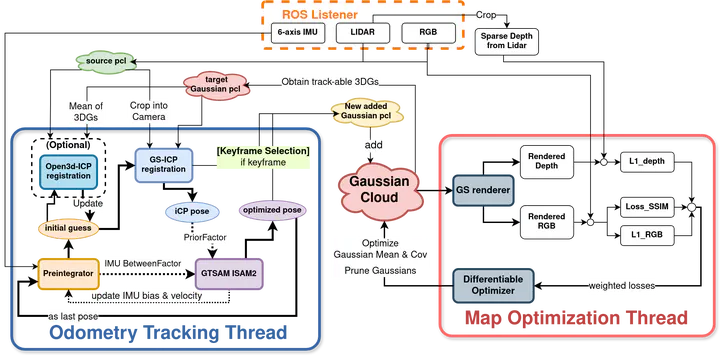
基于高斯溅射的雷达-视觉-惯性里程计(LVIO)6月 1, 2024 · 1 分钟阅读时长该项目进行于苏黎世联邦理工Robotics System Lab。描述:将雷达数据和RGB数据融合为统一的高斯点云,与全局高斯点云进行比较,通过最大似然估计来实现里程计结合GTSAM优化器实现了基于数据融合的LVIO,相较其他基于深度相机的GS-SLAM方案大大提升了定位精度和重建质量最近更新于 6月 1, 2024SLAM 高斯泼溅 激光雷达 Authors邓紫龙硕士研究生 ← 基于强化学习的无人机视觉跟随 9月 1, 2024基于NeRF对VR头戴相机进行图像稳定 6月 1, 2023 →