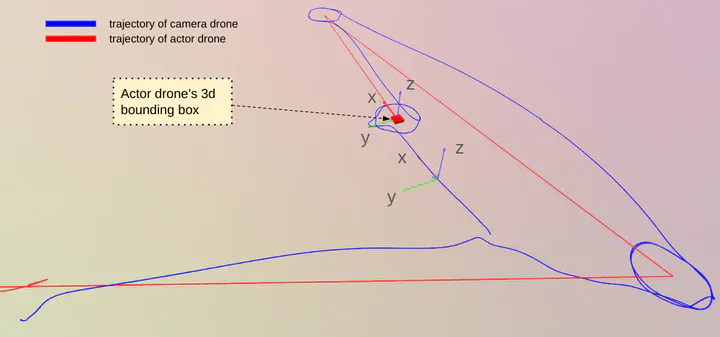
基于强化学习的无人机视觉跟随9月 1, 2024 · 1 分钟阅读时长该项目进行于苏黎世大学Robotics and Perception Group。Descriptions:基于yolo检测器输出的2d检测框,设计奖励函数并通过无人机仿真环境采样来训练强化学习模型,实现无人机在纯RL控制下稳定且平滑地追踪目标无人机最近更新于 9月 1, 2024无人机 计算机视觉 强化学习 Authors邓紫龙硕士研究生 基于高斯溅射的雷达-视觉-惯性里程计(LVIO) 6月 1, 2024 →