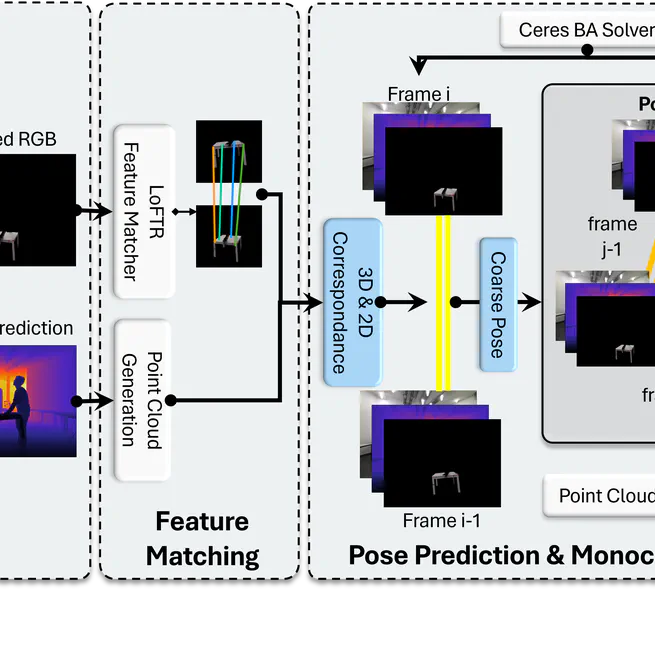
针对相机固定+运动物体的场景跟踪物体,进行6D姿态估计,并基于预测姿态进行几何模型重建或新视角生成;基于带有尺度误差和噪声的单目深度估计模型,通过鲁棒优化器实现仅有RGB输入的物体6D位姿估计(C++);通过训练NeRF或者高斯溅射模型,对带有尺度噪声的物体点云、位姿和尺度进行全局优化,实现物体三维重建与新视角生成。
7月 1, 2025