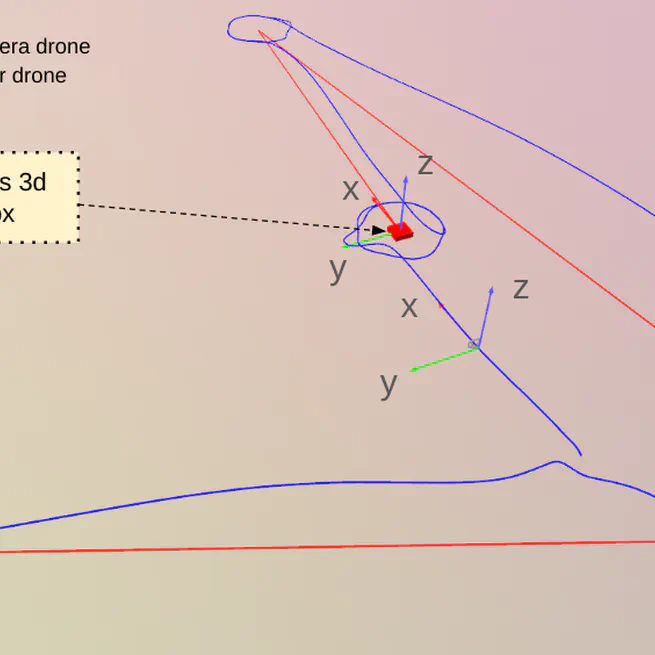
该项目进行于苏黎世大学Robotics and Perception Group。 Descriptions: 基于yolo检测器输出的2d检测框,设计奖励函数并通过无人机仿真环境采样来训练强化学习模型,实现无人机在纯RL控制下稳定且平滑地追踪目标无人机
9月 1, 2024