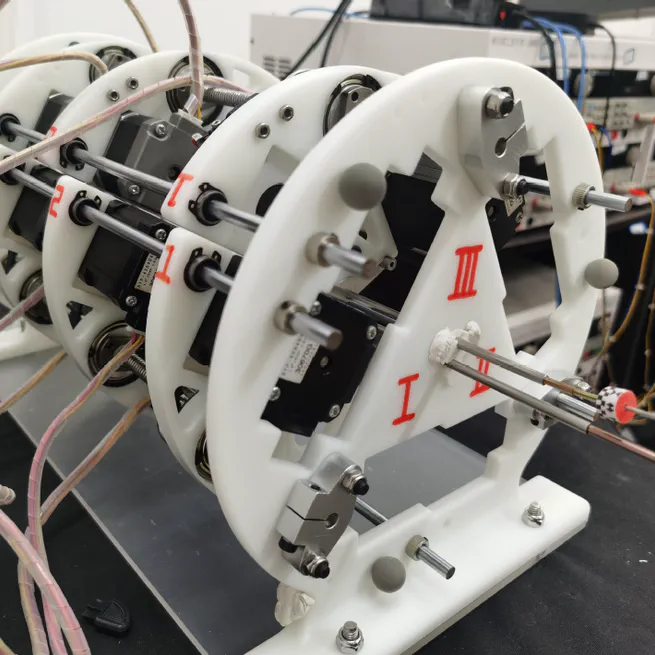
机械工程本科毕业设计。 描述: 实现了完整功能的多臂同心管微创手术机器人。包括机械设计,动力学建模,同心管臂标定以及多臂同心管机器人系统标定 设计了同心管机械臂的标定算法与基于视觉的连续体机器人末端视觉标签的6D姿态估计算法(C++) 在实现了臂与臂之间运动独立的同时,达到了一个更靠近中心轴线的臂间根部分布(臂与臂之间的距离足够小)
6月 1, 2022